Part 1 Objective
After you upload the program, Land Raider moves forward following the black line.
Part 2 Preparation
-
Assembled Land Raider x 1
-
USB cable x 1
-
Computer with network access x 1
-
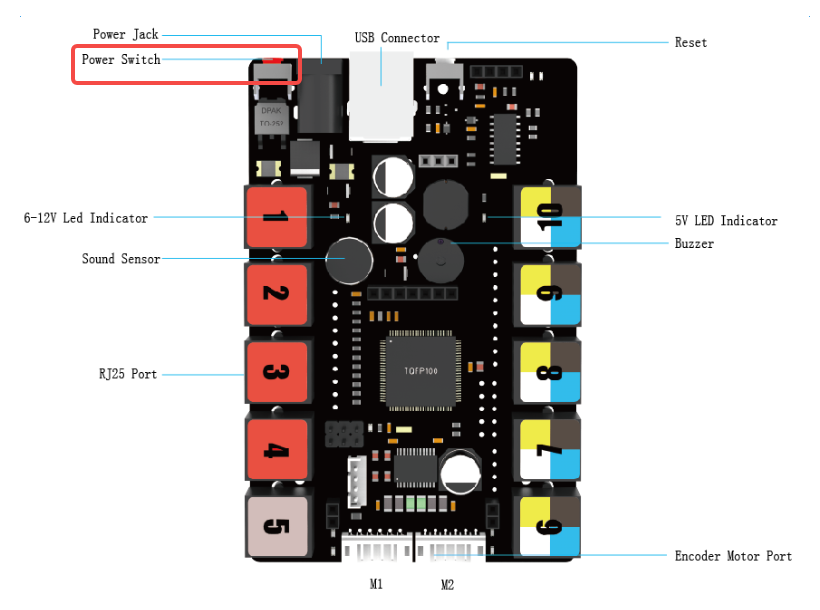
Connect the line follower sensor to Port 7 on Auriga
Connect Auriga to the computer by using the USB cable, open mBlock 5 (PC client or web version), connect CyberPi, select the Upload mode, and press the red button to turn on Auriga.
Part 3 Programming
Part 4 Practice
Let's brainstorm. Besides line following, what else can you do with the line follower sensor?
Comments
Please sign in to leave a comment.